
{kind=link}
Synthetic intelligence has dramatically improved how robots understand the world.
Laptop imaginative and prescient permits robots to detect objects, acknowledge patterns, and navigate complicated environments. Cameras assist robots determine elements on a conveyor, find packages in a bin, and keep away from obstacles in warehouses.
However when a robotic must choose up an object, imaginative and prescient alone just isn’t sufficient.
To govern objects reliably, robots want one thing people depend on consistently: contact.
That is the place tactile sensing turns into important.
Most robotic techniques at present rely closely on cameras.
Imaginative and prescient works effectively for:
- object detection
- pose estimation
- navigation
- scene understanding
However cameras can’t measure bodily interplay.
When a robotic grips an object, many important variables seem that cameras can’t observe straight:
- contact power
- strain distribution
- friction
- slip
- compliance of supplies
For instance, think about selecting up a moist glass, a smooth fabric, or a inflexible metallic part.
Every requires a special grasp technique. People routinely alter grip energy based mostly on what we really feel. Robots that rely solely on imaginative and prescient should infer these properties not directly, which is way tougher.
This limitation explains why manipulation stays one of many greatest challenges in robotics.
Human fingers comprise a number of sorts of mechanoreceptors that detect completely different points of contact.
These receptors permit us to understand:
- sustained strain
- vibration
- pores and skin deformation
- texture
- temperature
Collectively, these indicators assist us carry out dexterous duties equivalent to:
- tightening our grip when an object begins to slide
- adjusting finger place throughout manipulation
- recognizing objects with out trying
Robotic techniques want comparable capabilities to attain dependable manipulation.
Tactile sensing offers robots the flexibility to understand contact dynamics, which is crucial for interacting with the bodily world.

Trendy tactile sensing techniques can seize a number of sorts of data throughout a grasp.
Key sensing modalities embody:
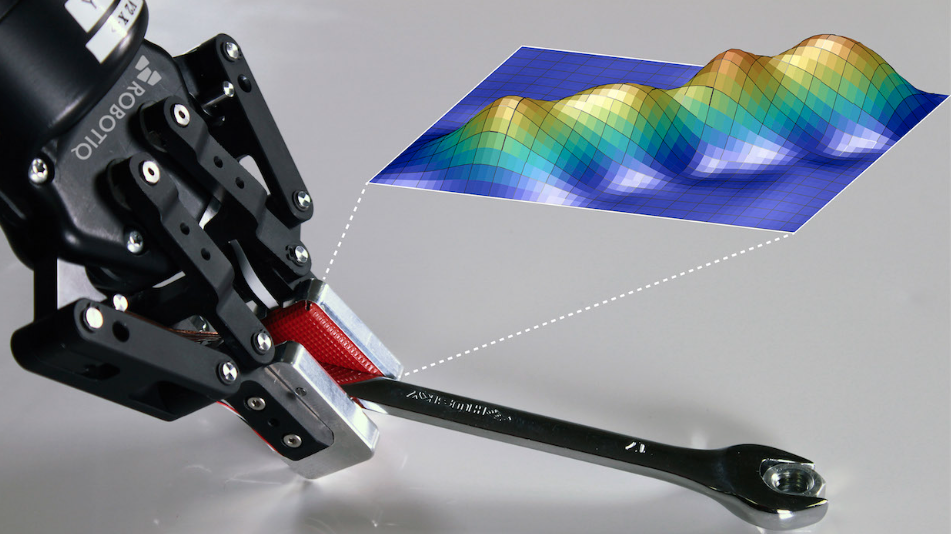
Stress
Measures the scale, form, and depth of contact.
Stress knowledge helps robots decide:
- grasp high quality
- object pose within the gripper
- object id
Vibration
Detects speedy modifications in touch.
That is helpful for figuring out:
- slip occasions
- collisions
- floor interactions
Proprioception
Measures the configuration of the gripper itself.
This helps robots perceive:
- finger positions
- gripper form
- object deformation throughout greedy
Collectively, these indicators give robots a a lot richer understanding of interplay with objects.
What tactile sensing means in robotics
Tactile sensing refers to applied sciences that permit robots to detect and interpret bodily contact with objects.
In contrast to imaginative and prescient techniques, tactile sensors measure interplay straight on the level of contact.
Widespread tactile sensing capabilities embody:
- strain detection (contact location and depth)
- vibration sensing (slip detection)
- power distribution throughout the gripper
- finger configuration and object deformation
These indicators permit robots to adapt their grasp, detect instability, and manipulate objects extra reliably.
As robotics strikes towards bodily AI, tactile sensing is turning into an necessary complement to imaginative and prescient techniques.
Though tactile sensing has existed in robotics analysis for years, adoption in trade has been slower.
A number of challenges clarify why.
Sensor sturdiness
Many tactile sensors developed in analysis labs are fragile and never designed for industrial environments.
Manufacturing environments introduce:
- mud
- vibrations
- temperature modifications
- steady operation
Sensors should stand up to tens of millions of cycles.
Knowledge interpretation
Tactile indicators are complicated.
In contrast to pictures, which people can simply interpret, tactile knowledge is:
- excessive dimensional
- noisy
- strongly linked to bodily mechanics
Understanding what tactile indicators imply throughout manipulation can require refined fashions and sign processing.
Lack of normal datasets
One other problem is the dearth of huge tactile datasets.
Imaginative and prescient techniques profit from billions of pictures and movies accessible on-line. Tactile knowledge, then again, should be collected via real-world interactions, which is way tougher to scale.
Regardless of these challenges, tactile sensing is turning into more and more necessary in robotics.
A number of traits are accelerating adoption:
- improved sensor sturdiness
- advances in AI and sign processing
- rising curiosity in bodily AI
- rising demand for robots that may deal with unstructured environments
Robots are not restricted to repetitive manufacturing facility duties. They’re being requested to carry out extra complicated manipulation duties, equivalent to:
- bin selecting
- versatile materials dealing with
- meeting operations
- human–robotic collaboration
These duties require robots to adapt to uncertainty, which makes tactile suggestions extraordinarily worthwhile.
Imaginative and prescient will stay a elementary sensing modality in robotics.
However the robots that reach real-world environments will mix a number of types of notion.
Future robotic techniques will depend on:
- imaginative and prescient for international notion
- tactile sensing for contact understanding
- power sensing for interplay management
Collectively, these sensing techniques permit robots to maneuver past easy automation and towards adaptive manipulation.
This mixture is likely one of the key constructing blocks of bodily AI.
In our white paper, we discover how sensing, {hardware} design, and Lean Robotics ideas are shaping the following technology of automation.
Discover the complete framework behind bodily AI
Learn the way mechanical design, sensing, and lean robotics ideas assist flip AI robotics demos into dependable automation techniques.
Learn the white paper: Giving bodily AI a hand

