

{kind=link}
One of many coolest new options in Betaflight Model 2025.12 would most likely be GPS Place Maintain and Altitude Maintain. Flip a change and your FPV drone can hover in place hands-off—extraordinarily helpful for emergency conditions, in addition to for cinematic and long-range flying.


Think about somebody approaches you when you’re flying: now you can cease immediately to speak to them. Or when you really feel drained mid-flight, you’ll be able to take your goggles off and seize a sip of water earlier than persevering with. It’s an incredible function, however it requires correct setup and ought to be used with warning. On this tutorial, I’ll present you set it up and share what I’ve discovered from testing it.
Earlier than establishing Place Maintain, I strongly suggest establishing GPS Rescue Mode as effectively. I’ve a devoted tutorial right here: https://oscarliang.com/setup-gps-rescue-mode-betaflight/
Demo Footage
Take a look at some footage how effectively place maintain works in Betaflight:
Official Documentation
I’ll attempt to preserve this information concise, however you also needs to take a look at the official documentation written by the Betaflight builders: https://www.betaflight.com/docs/wiki/guides/present/Place-Maintain-2025-12
{Hardware} Required
For Altitude Maintain and Place Maintain to work, all you want is a GPS module (with or with out a magnetometer).
Many flight controllers as of late additionally embrace a barometer. If yours doesn’t, that’s not finish of the world—Place Maintain will nonetheless work, as altitude could be estimated from GPS information. Nonetheless, a barometer is really useful as a result of it improves altitude accuracy.
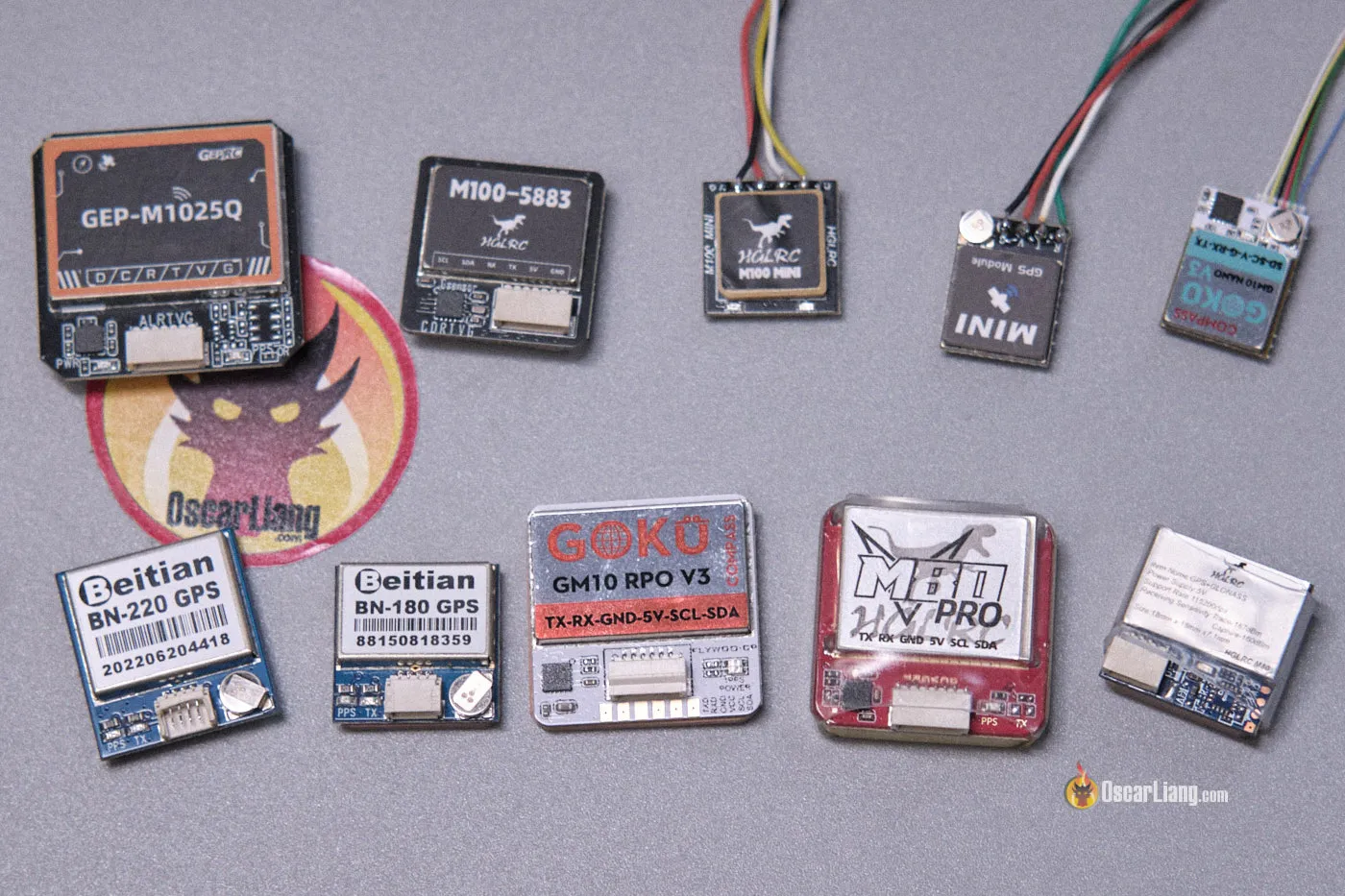
GPS Suggestions
See my GPS testing right here: https://oscarliang.com/gps-review/
Prime Performer: GEPRC M1025Q (With Compass)
Prime Performer: HGLRC M100 5883 (With Compass)
Smallest Value Having: GOKU GM10 Nano V3 (With Compass)
Smallest Value Having: FlyFishRC M10 Mini
Smallest Value Having: HGLRC M100 Mini
Do You Actually Want a Magnetometer?
Some GPS modules include a magnetometer (often known as a compass). Whereas it could enhance place maintain accuracy, it’s not obligatory.

I examined Place Maintain each with and with out a compass, and the distinction in efficiency wasn’t as dramatic as I initially anticipated.
The primary benefit of getting a compass is that you could activate Place Maintain instantly after takeoff, and it typically holds heading extra precisely all through the entire flight.
And not using a compass, you can not activate Place Maintain instantly—you must fly in a straight line for a number of seconds first, in any other case you’ll get a “Place Maintain Fail” error. It is because Betaflight wants ahead movement to estimate the heading course. It additionally makes use of the gyro to trace heading. Since gyros can drift over time, heading accuracy can slowly degrade, inflicting the drone to float.
That stated, in my testing, the quad held place and heading surprisingly effectively for nearly 8 minutes even with out a compass. Realistically, that’s greater than sufficient for most individuals, because it’s longer than a typical battery will final anyway.
Organising and calibrating a compass just isn’t straightforward, to say the least. If it’s accomplished incorrectly, it could truly make Place Maintain much less dependable. There’s additionally further upkeep concerned—you ideally have to recalibrate the compass when flying in a distinct location to get essentially the most correct readings.
So sure, it’s a good quantity of labor. If you will get away with out a compass, I most likely wouldn’t trouble. Nonetheless, when you plan to make use of Place Maintain recurrently and need the very best efficiency, then a compass can positively be helpful.
I’m presently writing a submit to cowl arrange and calibrate a magnetometer—coming quickly.
The place to Mount GPS
It’s best to place the GPS as distant as doable from the next sources of interference:
- VTX antennas
- ESC, motors, and motor wires
- Energy cables (e.g. XT60)
- Motion cameras (comparable to a GoPro)
Good places for mounting a GPS module embrace:
- Above the FPV digicam
- On the rear of the drone (so long as it’s not too near the VTX antennas)
- On the battery strap



The way to Join GPS to FC
Connecting a GPS module to an FC is pretty easy. Merely join it to an out there UART on the FC (TX to RX, RX to TX), and energy it with 5V. When you have a compass, you additionally want to attach the i2c port (SDA and SCL wires):
- GPS RX → FC TX
- GPS TX → FC RX
- GPS 5V → FC 5V
- GPS GND → FC GND
- GPS SDA → FC SDA (if the GPS has a compass)
- GPS SCL → FC SCL (if the GPS has a compass)
Reminder: Keep away from utilizing SoftSerial for GPS connections. SoftSerial is restricted to a 19200 baud price, which is just too gradual and may compromise GPS reliability—particularly for options like Rescue Mode and Place Maintain. All the time use a {hardware} UART for essentially the most steady and dependable efficiency.

Replace Betaflight
Flash Betaflight to model 2025.12 or newer.
Vital: To flash and configure the most recent firmware, you need to use the Betaflight internet app, not the standalone desktop software:
https://app.betaflight.com/

When deciding on construct choices, ensure that the next options are enabled:
- Altitude Maintain
- Place Maintain
- GPS
- Magnetometer (if you’re utilizing a compass)
Unsure flash Betaflight? Take a look at this information: https://oscarliang.com/flash-update-betaflight/
Betaflight Setup
Ports Tab

Allow GPS on the UART to which the GPS module is linked.
Configuration Tab

Allow the next choices:
- Accelerometer (MUST be enabled)
- Barometer (in case your have one)
- Magnetometer (when you’ve got one)
In case you are not utilizing a magnetometer, enter the next command within the CLI:
set pos_hold_without_mag = ONsave
GPS Tab

These are my settings for GPS module.
Modes Tab

It’s really useful to make use of Altitude Maintain and Place Maintain collectively, so I assign them to the identical change.
- Altitude Maintain: ALTHOLD
- Place Maintain: POS HOLD
I take advantage of a 3-position change:
- Place 1: Each modes OFF
- Place 2: Altitude Maintain ON
- Place 3: Altitude Maintain + Place Maintain ON
This setup means that you can check or use Altitude Maintain independently if wanted.
OSD Tab

Allow “Fly Mode” so you’ll be able to clearly see which mode is lively.
The “Dwelling Path” arrow can be very helpful for validating heading—particularly when you’re flying with out a compass.
Hover Throttle

Lastly, go to the CLI tab, and set the hover throttle worth (this is similar worth used for GPS Rescue mode btw):
set ap_hover_throttle = 1275save
Exchange 1275 with your individual hover throttle worth based mostly on testing.
Accelerometer Calibration
Identical to Rescue Mode, each Place Maintain and Altitude Maintain depend on Angle Mode, which makes use of the accelerometer. Due to this fact, you need to calibrate the accelerometer earlier than utilizing these modes to reduce drifting.
Place your quad on a degree floor, then go to the Setup tab and click on Calibrate Accelerometer.

To check Angle Mode, strive hovering the drone and see if it self-levels as anticipated. Take into account that Angle Mode makes use of solely the accelerometer and gyro, so it gained’t maintain place completely like a DJI drone. That’s precisely why we’re establishing Place Maintain.
A small quantity of drift brought on by sensor error, weight distribution, or wind is regular. You’ll be able to decrease this by trimming the accelerometer utilizing stick instructions after touchdown, trim in the other way of the drift, as an example:
- If the drone drifts left, use Trim ACC Proper
- If it drifts backward, use Trim ACC Ahead
It’s unlikely you’ll eradicate drift utterly. The aim is to reduce it—so long as the drift isn’t extreme, it ought to be superb.

Magnetometer Calibration
You’ll be able to skip this part if you’re not utilizing a magnetometer.
Magnetometer setup and calibration is a reasonably complicated matter and actually deserves its personal devoted information. I’ll be publishing a separate submit on this quickly.
For now, right here’s the official Betaflight documentation that explains the method intimately: https://www.betaflight.com/docs/wiki/guides/present/magnetometer
The way to Use Altitude Maintain
Now we’re able to strive these flight modes.
Altitude Maintain could be activated independently of Place Maintain.
As soon as activated, Altitude Maintain behaves equally to Angle Mode (self-leveling), however with computerized throttle management. When your throttle stick is centered, the drone will try to keep up a set altitude. You too can decrease the throttle stick all the way in which to 0%, it does the identical factor.
Should you elevate or decrease the throttle from middle, the drone will climb or descend.
Nonetheless, identical to Angle Mode, the drone will nonetheless drift, and also you’ll have to right that drift utilizing the pitch and roll sticks. That is regular and anticipated.
Vital: Getting the hover throttle worth proper is necessary. If the worth is just too low, the quad will instantly drop when Altitude Maintain is activated. If the worth is just too excessive, the quad will instantly climb. You’ll be able to regulate the hover throttle within the OSD menu beneath GPS Rescue, or through the CLI utilizing the ap_hover_throttle setting.
Lastly, don’t anticipate DJI-level altitude stability. Altitude Maintain in Betaflight makes use of solely the barometer to estimate altitude, so going up and down barely is regular.
The way to Use Place Maintain
To make use of Place Maintain, it’s really useful to activate Altitude Maintain on the similar time, ideally utilizing the identical change.
Earlier than testing Place Maintain, you need to first check Altitude Maintain by itself. Ensure there’s no sudden drop or climb in altitude whenever you have interaction it. If the quad instantly climbs or sinks, regulate the hover throttle first.
As soon as Altitude Maintain is working easily, you’ll be able to transfer on to testing Place Maintain.
When Place Maintain is lively, the OSD flight mode will show POSH.

Utilizing Place Maintain With a Compass
In case you are utilizing a magnetometer (compass), you’ll be able to activate Place Maintain at any time throughout flight, so long as you have got an excellent GPS lock (not less than 8 satellites) earlier than takeoff.
When engaged, the quad ought to maintain its place routinely. A small quantity of drift—sometimes inside 1m—is regular in keeping with the Betaflight builders.
You’ll be able to nonetheless transfer the quad utilizing pitch, roll, and yaw, much like Angle Mode, however stick responsiveness is considerably diminished in comparison with regular Angle Mode.
Utilizing Place Maintain And not using a Compass
In case you are not utilizing a compass, Place Maintain just isn’t instantly out there after takeoff.
Should you attempt to activate it too early, you’ll see a “POSHOLD FAIL” warning within the OSD. You will need to first fly in a straight line for a number of seconds (or roughly 100 meters) so Betaflight can estimate the heading from GPS information.

To confirm you might be prepared, test the house arrow within the OSD—if it factors within the right course, Place Maintain ought to work.
In my testing, Place Maintain labored surprisingly effectively with out a compass. The quad held each place and heading for over 7 minutes, till the battery ran out (most likely may have gone on for longer). Nonetheless, if drifting begins to happen, you might have to disengage Place Maintain, fly straight once more briefly to refresh the heading estimate, after which re-engage it. That is the primary draw back of not having a compass.
Is This the Similar as DJI’s Panic Button?
Not fairly.
On the DJI Avata 2, urgent the panic button instantly brakes and stops the drone virtually immediately. Place Maintain behaves equally, however it’s not as aggressive, particularly when you’re flying quick.
If you’d like stronger braking, you’ll be able to enhance the ap_max_angle worth (default is 50°, most is 70°). Larger values end in extra aggressive braking habits.
Potential Points and Troubleshooting
My Quad Gained’t Arm
You can’t arm the quad whereas Place Maintain or Altitude Maintain is already engaged. Ensure each modes are disengaged earlier than arming.
Altitude Wavering
Based on the Betaflight documentation, altitude stability inside about 1 meter is regular. It gained’t be as steady as DJI drones, which use LiDAR and different digicam sensors. Betaflight depends solely on barometer.
Wind and excessive airspeed can even trigger errors, as airflow over the barometer impacts air stress and readings. You’ll be able to scale back this by overlaying the barometer with a small piece of open-cell foam, permitting stress adjustments however limiting airflow.
“POSHOLD FAIL” Warning in OSD
This often occurs when:
- You don’t have a compass and haven’t flown straight lengthy sufficient to determine heading, or
- There aren’t sufficient GPS satellites locked
Quad Flies Off at a Dangerous Angle or Circles
If the quad instantly flies off at an odd angle or begins circling, the heading data (from GPS or magnetometer) is probably going incorrect.
Should you’re not utilizing a magnetometer, disengage Place Maintain and fly straight for 50–100 meters at a gentle velocity with minimal roll or yaw enter, then strive once more.
Conclusion: Place Maintain Is Helpful, however Not Foolproof (But)
In my expertise, when Place Maintain works, it really works rather well. Nonetheless, there have been instances it was doing bizarre stuff like pulsating, wandering, or was simply wobbly—and on a few events, it simply didn’t work.
It is a highly effective and genuinely helpful function, however it’s not foolproof but. It’s best to check it completely earlier than counting on it in real-world conditions.
Personally, I’ll primarily use it for emergency eventualities—when you must take your goggles off or put the radio down briefly. That alone is usually a lifesaver. Nonetheless, I’d not belief it to hover over individuals with out actively controlling the quad. Use frequent sense.